
中信建投:當下市場對仿人機器人的認知仍有重大偏差

I'm PortAI, I can summarize articles.
中信建投證券認為,在 Tesla bot 大規模量產後,電機、減速器、電池需求將開啓上量趨勢,看好國內企業量價齊升。
近年來,機器人呈現從機械化向仿人化發展的新趨勢。
日前,馬斯克宣佈將於 9 月 30 日發佈人形機器人原型機,一石激起千層浪。市場對此展開了多方位研究和分析。
中信建投證券分析師朱玥、張亦弛在最新的報告中認為,當下市場對仿人機器人的認知仍有重大偏差。
兩位分析師認為,目前市場簡單復刻工業機器人的硬件構成和技術要求對其供應鏈進行分析,認為仿人機器人與工業機器人在供應鏈上相差無幾。
但無論是從研發設計角度,還是規模量產角度,仿人機器人與工業機器人差異非常大,在結構設計、硬件構成、控制算法、核心性能要求以及零部件選擇上都有很大的差異。
他們表示,仿人機器人技術壁壘極高,非普通機器人廠家可短期轉型:
“仿人機器人涉及工程學和控制科學,彙集電子、機械、自動化控制及計算機等領域的研究成果,不是簡單買來零部件組裝就可實現仿人功能。仿人機器人核心設計要求也與普通機器人不同,哪怕是國際領先的工業機器人廠家也很難短期切入。”
仿人機器人的技術構思
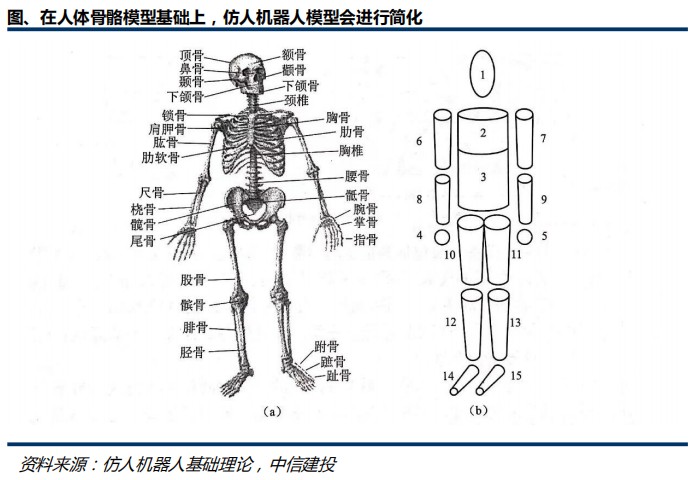
一個普通成年人一般具有 206 塊骨骼和近 230 個關節,構成由 630 肌肉控制的 244 個自由度。
如果對人體精確建模,工作將極其複雜,Hanavan 於 1964 年提出將人體模型簡化,通常分為 15 個部分,對應人體的頭部、胸部、大臂、小臂、手、大腿、小腿及腳部。
仿人機器人是一種具有高自由度、強非線性的動力學系統,通常採用多剛體動力學系統和仿真數值計算結合的方法進行動力學和運動學分析。在機器人運動分析中,包含動力學分析和運動學分析,其中運動學分為正運動學和逆運動學。
仿人機器人不僅具有人體的部分外形,如上肢、頭部等,同時應具備人類的下肢結構和類人的雙足步行能力。
在仿生機構設計過程中,首先根據目標規格,決定自由度的構成,決定關節類型及數量,在結構上通常由多個單自由度的旋轉關節構成。
通常使用傳感器完模擬人對環境的感知,例如機器視覺、壓力傳感器、觸摸傳感器、定向麥克風,聲吶測距儀等。
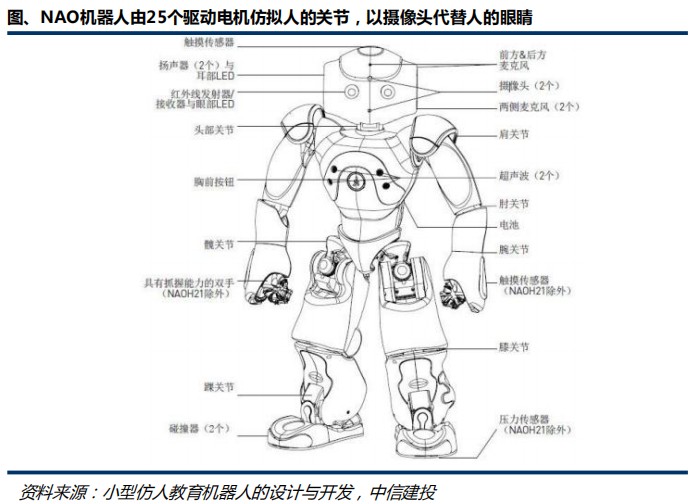
以中小型仿人機器人 NAO 為例,其共有 25 個驅動電機、2 個攝像頭、9 個觸摸傳感器、4 個定向麥克風、8 個壓力傳感器、2 套紅外接收器發生器以及聲吶測距儀等。
NAO 機器人由法國的 Aldebaran Robotics 公司推出,銷量達一萬多台,公司一直堅持商業化的路徑,與波士頓動力、日本 HONDA 有很大的差異,後來被日本的軟銀收購。後續推出 Pepper,Romeo 機器人。
關節驅動三條技術路線:電機驅動應用範圍廣
在關節驅動方面,目前仿人機器人存在三種技術路線。
路線一:液壓驅動。其優點是,輸出功率大,不需要減速器,力量大,爆發力強,可承受機械衝擊和損傷的能力強;缺點是,液壓系統易漏油,體積大,噪聲大,功耗高,必須配置液壓源。

路線二:電機驅動。
又分為三種方案:①傳統電機驅動 + 力矩傳感器。優點:結構簡單,位置伺服精確;缺點:力矩伺服差,傳動損耗高,爆發力不如液壓驅動。

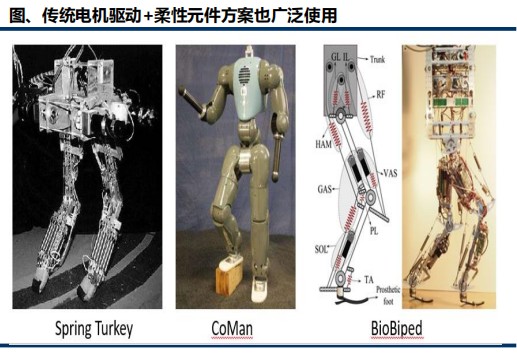
②電機驅動 + 柔性軟件。優點:力矩精度高,被動柔性,可實現能量儲存循環;缺點:位置伺服差,響應帶寬有限。
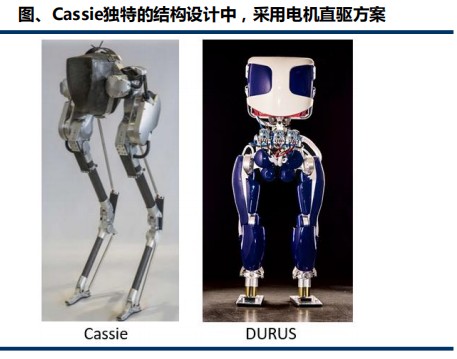
③電機直驅方案。優點:力矩精度高,位置精度高,響應速度快;缺點:電機需要特製,電機體積大。
液壓、電機和氣動驅動方式各有特點,其中電機驅動最為傳統,技術進步迭代速度快,全球應用範圍廣;液壓驅動難度高,液壓閥難度極高,系統成本非常昂貴,機器人運動性能最優秀;氣動驅動性能介於液壓和電機直接,目前應用相對較少。
工業機器人要求高精度,仿人機器人追求感知和反應速度
仿人機器人和工業機器人在硬件結構設計、自由度配置、控制方法和內容上有顯著差別。
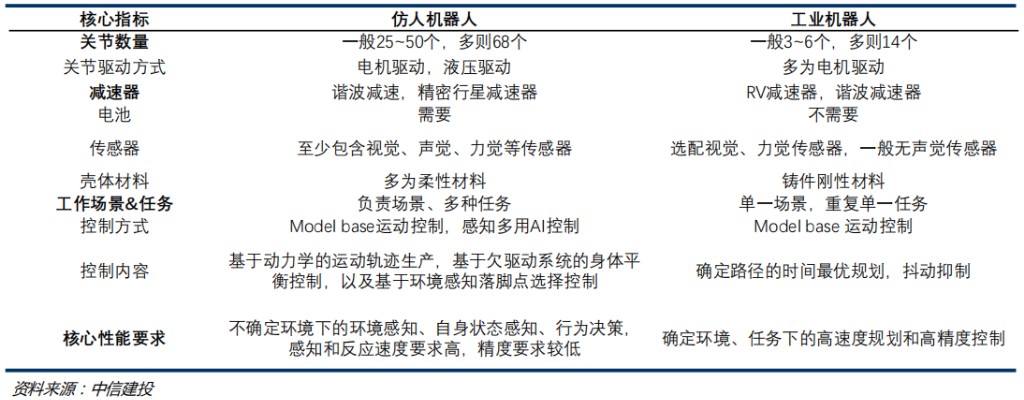
①仿人機器人關節/電機數量遠高於工業機器人,價值量更可期。
仿人機器人在結構上更加複雜,不僅包含兩個手臂,同時包含雙足和頭部,機器人整體的自由度/關節數量通常為 20-50 個,甚至更高。工業機器人形態為機械臂,包含大臂、小臂、腕部和手部,自由度/關節的數量通常為 3-6 個,極少數會超過 10 個。
②減速器:仿人機器人需要控制自重,更多使用諧波減速器;工業機器人在減速器選擇上面更廣,尤其在大負載的機型裏,其一二三軸必須用到 RV 減速器。

③仿人機器人視覺系統性能要求、數量需求更高。
仿人機器人視覺系統為標配,且要求高,大多為雙目視覺(需要 2 個相機),有時需用到 3D 視覺,相機數量與整體價格比工業機器人視覺更高。工業機器人視覺並非標準配置,屬於可選擇的高配選項,通常包含一個工業相機,大多為 2D 視覺。
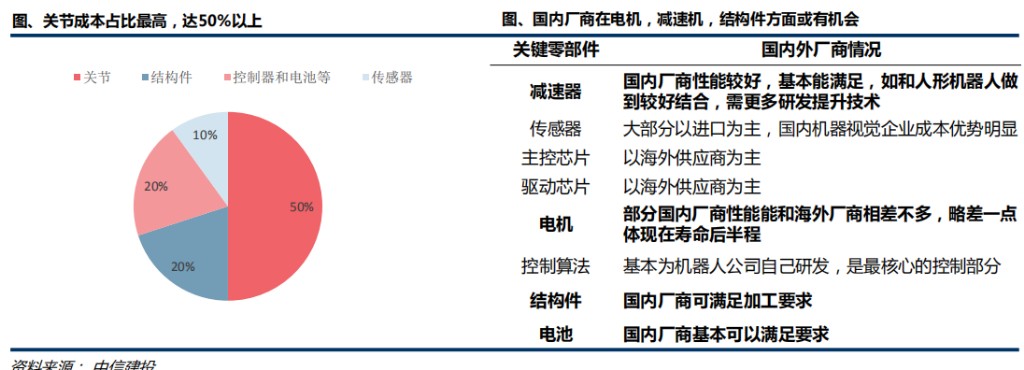
中信建投認為,國內廠商在電機、減速機、機構件方面或有機會:
仿人機器人 50% 以上的成本來自於關節,如用電機驅動,一個關節使用一個電機,電機用量非常可觀,國內電機廠商在性能上與海外廠商差距不大。減速器方面,從性能上來看,部分國內廠商基本可以滿足。結構件成本佔比為 20% 左右,僅次於關節,需根據仿人機器人的設計進行定製化生產,作為傳統機加工技術,國內廠商可以滿足要求。
Tesla bot 大規模量產後,電機、減速器、電池需求開啓上量趨勢
仿人機器人最核心的優勢是能夠在複雜環境下完成多種任務,這需要仿人機器人具備良好的交互功能,而要實現良好的人機交互性能,算法、AI 技術、傳感器都不可少。
東吳證券此前也梳理了仿人機器人的產業鏈:
上游為核心軟硬件,硬件主要包括伺服電機、減速器、控制器、傳感器等,軟件包括機器視覺、人機交互、機器學習、系統控制等;
中游則是人形機器人本體制造商,國內包括優必選、北京鋼鐵科技、國外包括波士頓動力、美國敏捷機器人、日本豐田、本田、特斯拉等;
下游目前還未有成熟的商業應用,可能的應用場景包括迎賓接待、展廳引導、高校科研等。
目前芯片以海外為主,軟件算法為機器人核心技術,絕大部分公司選擇自主研發,電機、減速器、結構件等硬件環節具備產業鏈機會。
中信建投認為,隨着機器人的運動性能與感知決策能力提升,規模量產帶來成本下降,仿人機器人將滲透至以陪伴、教育為代表的服務業,市場空間非常廣闊。
其在報告中總結道:
1、電機作為關節裏的核心驅動部件,影響關節的輸出力大小和運動性能。區別於工業機器人,仿人機器人需控制整體質量和體積,要求電機性能更高,質量更輕。在 Tesla bot 實現量產後,將帶動電機需求快速爆發,新增電機市場規模有望達近千億元,建議關注國內電機龍頭企業;2、減速器作為仿人機器人關節裏的另一核心部件,作為精密的動力傳達機構,將電機的轉速減速到所需的轉速,實現扭矩的增加,直接影響關節的輸出力矩和精度。在精度要求較高的關節裏,通常選擇諧波減速器,隨着 Tesla bot 的規模量產,新增諧波減速器的市場規模將遠超工業機器人,建議關注國內龍頭企業;3. 結構件作為仿人機器人的 “骨骼”,形成機器人的內在基本架構,連接全身結構於一體,承受負載和支撐全身,影響機器人結構的剛度,以及負載大小。我們預計結構件成本佔比約 20%,需按照機器人結構進行定製化生產,大部分國內機加工企業可滿足加工要求;4. 區別於工業機器人,每台仿人機器人需要配置至少一塊電池或一套電池模組,電池容量將直接影響機器人正常運行時長。建議關注國內電池性能良好、性價比高的龍頭企業;5. 傳感器是實現仿人機器人環境感知與交互功能的核心部件,其使用數量或將是工業機器人的幾倍,甚至十倍以上。通常一台機器人配置一套機器視覺系統,選擇性配置一套語音系統,但每個關節都可能配置位置、角速度、力矩傳感器等內部傳感器,其市場需求也將迎來高速增長,建議關注國內傳感器、機器視覺龍頭企業;6. 機器人殼體作為 “皮膚”,覆蓋面積較大,將影響其工作場景和環境適應能力,需使用例如硅膠、碳纖維等質量輕、性能好的柔性材料,建議關注國內柔性材料企業
當然,中信建投也指出,巨大市場藍海能否兑現,核心還要看產品量產和成本控制。由於結構複雜,控制性能要求高,仿人機器人成本非常昂貴,現實情況是超過百萬人民幣。在保證性能的前提下,同時能實現量產降低成本,將成為打開市場的關鍵。
本文觀點主要來自於中信建投證券研報《仿人機器人:賦予機器 “生命”,機器替人不再是想象》,原文作者:朱玥、張亦弛
Source: 華爾街見聞 The copyright of this article belongs to the original author/organization.
The views expressed herein are solely those of the author and do not reflect the stance of the platform. The content is intended for investment reference purposes only and shall not be considered as investment advice. Please contact us if you have any questions or suggestions regarding the content services provided by the platform.
Post your comment

No Comments